Zackery SobinSenior Firmware Engineer | Patent Holder | Former US Navy Nuclear Electronics Technician |
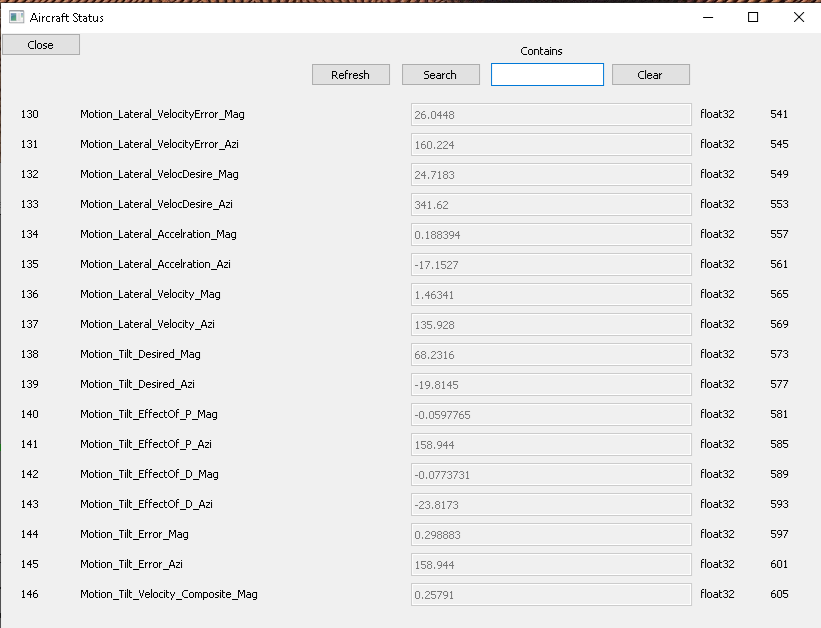
Resume & QualificationsTechnical PortfolioPersonal Research Project: VectorFlight🚀 Advanced Flight Logic & Network SimulationResearching real-time network behavior, telemetry protocols, and "Software in the Loop" physics simulations. 
Industrial Control Systems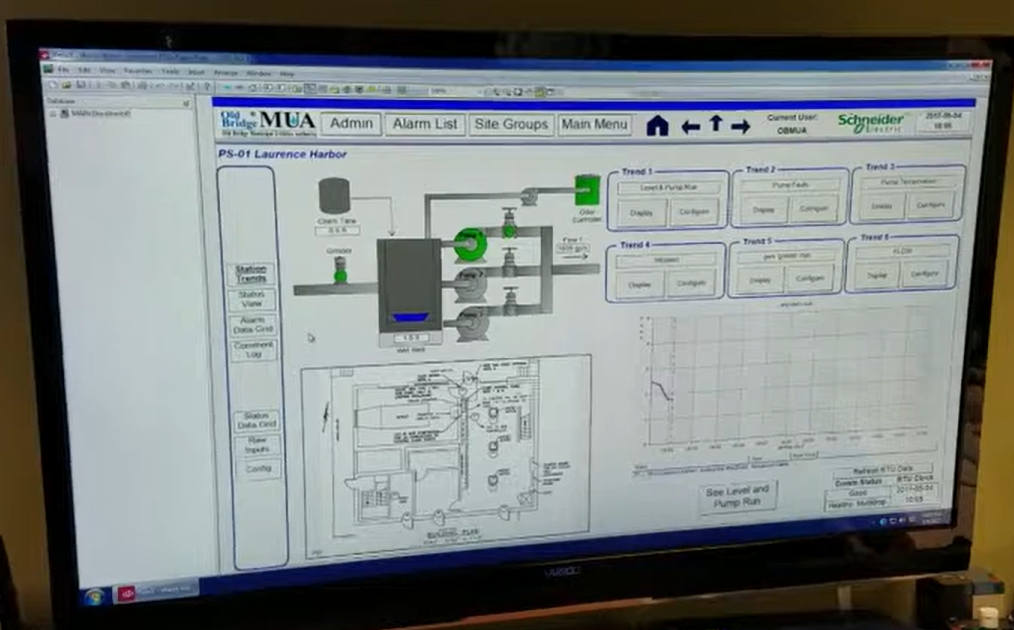
▶ Play Video
OBMUA Sewer SCADA: Programmed the control logic and telemetry systems for municipal infrastructure. 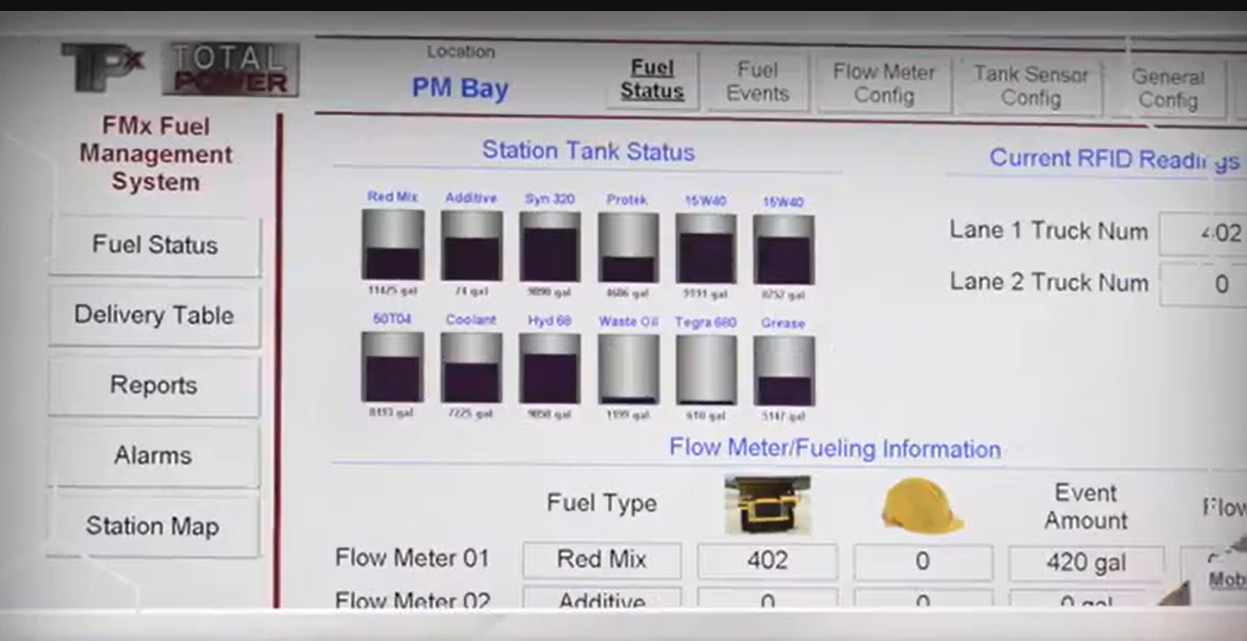
▶ Play Video
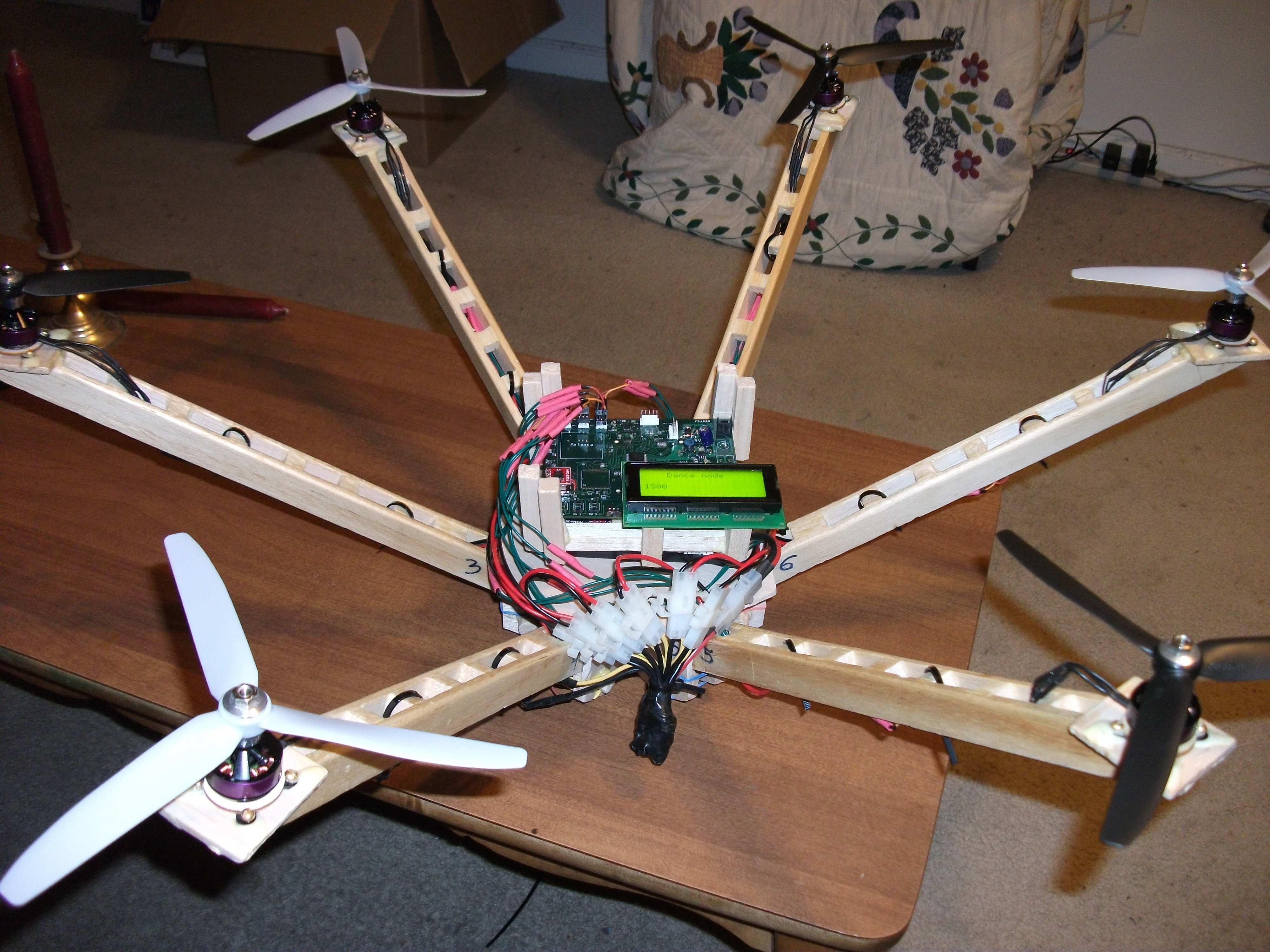
Fmx Total Power: Responsible for firmware development and system design for the fuel management system. Hydraulic Control DemonstrationCoordinated software control of multiple valves and a variable swashplate pump. 3D Modelling & PrototypingPhysical Prototype
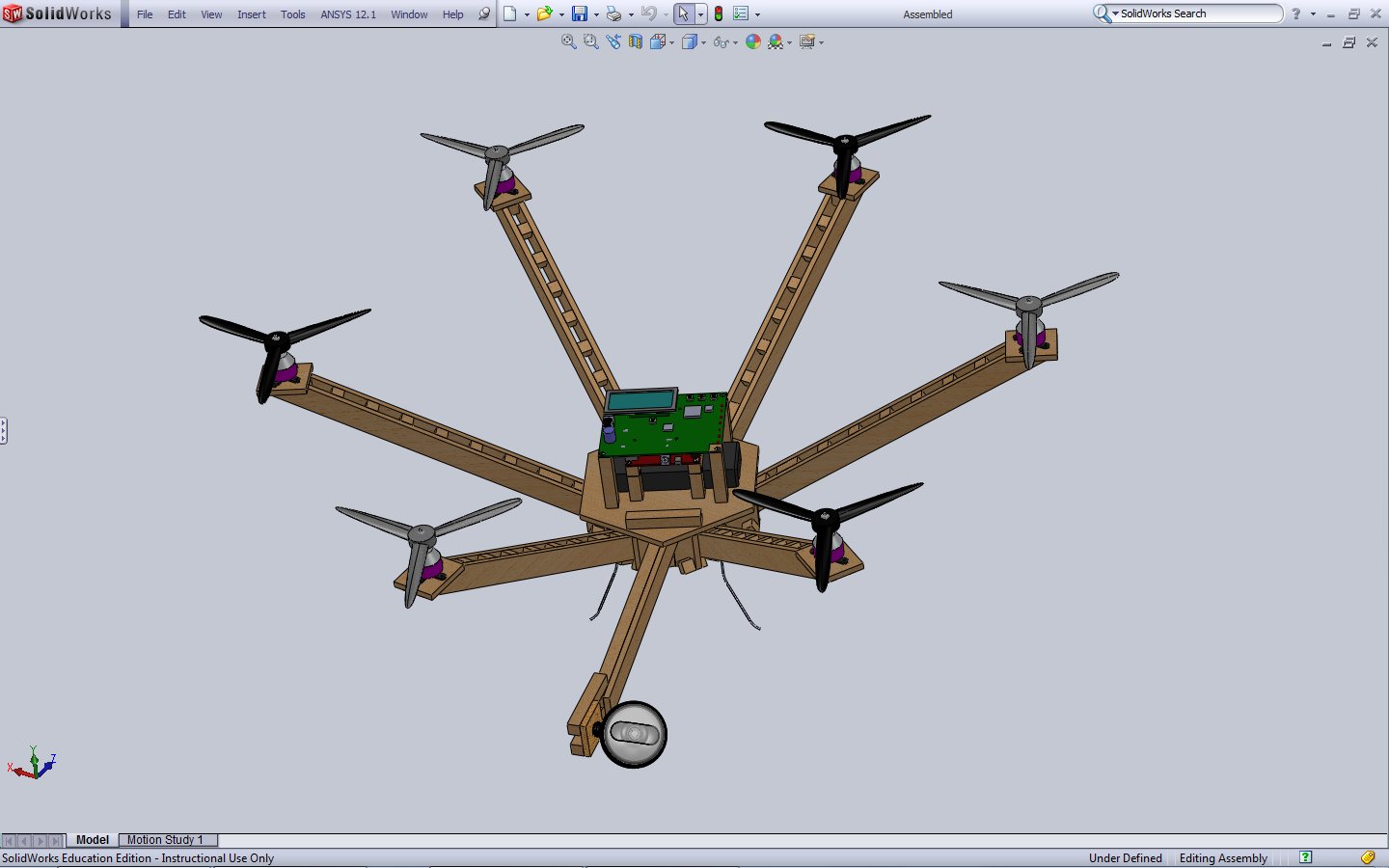
SolidWorks Assembly
|